










Luftvärnsrobotsystem 68
Bloodhound MK II
Vi befinner oss någonstans i det natursköna Blekinge för att besöka en plats som tidigare varit mycket hemlig. Det är få som känner till platsen och dess funktion, men låt oss berätta om den mycket viktiga funktion som huserade här för det svenska försvaret under kalla kriget.
Längs en mindre landsväg finner vi den anonyma infarten till övningsplatsen, en smal och gräsbeklädd väg slingrar sig uppför det lilla berget mot hjässan. Bland grönskande buskar och träd finner vi betongrester i form av betongplattor och fundament, rester som vittnar om den tidigare militära närvaron på den oansenliga bergknallen.
Platsen mättes in år 1967 och anläggningsarbetet för vad som skulle komma att bli en övningsplats för luftvärnsrobotsystem 68 påbörjades 15 februari 1968 för att senare färdigställas 1 april samma år, därefter överlämnades övningsplatsen till F17 Kallinge. Arrendeavtalet mellan Kronan och markägaren skrevs på och skulle löpa i 30 år, och betalningen var ett engångsbelopp på 40.000 kronor (360.000 kronor i dagens penningvärde 2017) i kontanter. Beloppet överlämnades över köksbordet hemma hos markägaren som i samband med detta fick en extranyckel och ett telefonnummer. Nyckeln gick till låset på bommen som spärrade vägen upp mot hjässan och telefonnumret till den berörda FO-staben dit han skulle ringa om han vid något tillfälle iakttog något misstänkt vid platsen.
Vid övnings- och fredsgrupperingsplatserna fanns åttkantiga robotplattor medan robotplattorna vid krigsgrupperingsplatserna var fyrkantiga, anledningen var att man ville försvåra kartläggningen för en tänkbar fiende. En fiende torde leta efter åttkantiga betongplattor eftersom det var så som de såg ut vid flottiljerna (en maskirovska av det svenska försvaret). Det fanns dessutom hårdgjorda ytor förberedda för uppställning av robotgruppcentral, belysningsradar och motorelverk. Två mastfundament avsedda för simulator-masten och radiolänk-masten fanns också förberedda på platsen. Via teleskåpet som endast fanns vid övningsplatsen kunde man koppla upp sig mot en luftförsvarscentral (LFC), men det gick också att koppla in sig på den helt vanliga telekabeln. Vid anrop till LFC användes täcknamnet (t.ex. Limpan).
Något fast närförsvar (t.ex. skyddsrum eller värn) vid övnings- och krigsgrupperingsplatsern fanns inte eftersom detta kunde ge en fingervisning om platsens betydelse. Platserna var dock noggrant rekognoscerade för ett närförsvar som fanns infört i stridsplanen som hade stämpeln “kvalificerat hemligt – av synnerlig betydelse för rikets säkerhet”.
Av det sex grupperingsplatser som tillhörde F17 Kallinge så var det enbart vid övningsplatsen som det fick bedrivas militär aktivitet, allt för att inte röja krigsgrupperingsplatsernas funktion och placering. Hemlighetsmakeriet kring dessa platser var så stor att man varken omgärdade området med staket eller skyltning som påvisade vem som höll till vid platsen. Vid den årliga tillsynen av krigsgrupperingsplatserna var det civila kläder och civila bilar som gällde.
Mellan åren 1968 och 1978 bedrevs det många övningar vid övningsplatsen Limpan, allt ifrån handhavandeövningar, tillämpningsövningar till krigsförbandsövningar (KFÖ). Övningsplatsen Limpan användes av robotkompanier från F17 Kallinge men den nyttjades även av robotkompanier från F10 Ängelholm och F12 Kalmar.
Generellt låg övningsplatserna cirka tio mil från flottiljen, men Limpan var ett undantag, och varför vet vi inte. Anledningen till att övningsplatsen skulle förläggas en bra bit bort var att man ville få chansen att öva alla de beståndsdelar som en omgruppering i skarpt läge skulle ha inneburit.
Övningsplatsen ingick i krigsorganisationen och krigsplanläggningen, men eftersom man räknade med att den skulle vara röjd i förhand så skulle övningsplatsen endast användas i yttersta nödfall. Totalt fanns det 33 hemliga krigsgrupperingsplatser (övningsplatserna inkluderade) längs med östkusten, från Uppland i norr till Skåne i söder.
Vid F17 Kallinge fanns en robotdivision med två robotkompanier mellan åren 1965 och 1974, dessa var:
- 171. luftvärnsrobotkompaniet.
- 172. luftvärnsrobotkompaniet.
Dessa kompanier hade grupperingsområdena F17A (tre platser) och F17B (tre platser). Inom grupperingsområde F17A Blekinge fanns följande:
- Bräkne-Hoby – övningsplats, täcknamn Limpan.
- Backaryd – krigsgrupperingsplats.
- Sillhövda – krigsgrupperingsplats.
Inom grupperingsområde F17B i nordöstra Skåne fanns följande:
- Arkelstorp – krigsgrupperingsplats.
- Kiaby – krigsgrupperingsplats.
- Söndraby – krigsgrupperingsplats.
När robotdivisionen på F17 Kallinge skulle skjuta skarpa robotar var det övningsfältet i Vidsel med sin areal av Blekinges storlek som fick användas. Första skjutningen genomfördes under vintern 1969 och krävde noggrann detaljplanering, i första hand för transporten norrut. Det var en imponerande fordonskolonn med lastbilar, tunga släp och mindre fordon som lämnade flottiljområdet för att köra de dryga 140 milen (enkel resa). En begränsad maxfart innebar att de fick spendera fem dagar på väg. Övernattningar skedde vid olika förband längs vägen mot Vidsel. Både trafikpolisen och säkerhetspolisen (SÄPO) kände väl till färdplanerna och höll ett vakande öga över fordonskolonnen som sakta ringlade sig upp mot Vidsel. Väl på plats så sköt robotdivisionen två robotar med godkänt resultat. Sex år senare var det dags igen för fordonskolonnen att bege sig mot Vidsel för skjutning av tre robotar, även dessa genomfördes exemplariskt. De båda övningarna tog cirka sex veckor var.
Kuriosa: den sista robot 68 (RB 68) lämnade lavetten 9 oktober 1975, den som avfyrade roboten var Anders Eklund och det näst sista skottet avfyrades av Hans Fehrnström 30 september 1975.
1. Luftvärnsrobotsystem 68
I juni 1961 föreslogs att luftvärnsrobotsystemet 68 Bloodhound MK II skulle anskaffas till det svenska flygvapnet. I dokumentet Luftvärnsrobotsystem 68 Bloodhound MK II skriver författaren Dag N H Malmström att motiveringen för anskaffningen var: “För att bibehålla och förbättra luftförsvarets möjligheter att infria målsättningen enligt gällande försvarsbeslut är det önskvärt att komplettera jaktflyget med robot 68, främst på grund av detta vapensystems förmåga att bekämpa snabba mål och till hög insatsberedskap. Det är också värdefullt att robot 68 förbanden kan insättas mot vapenbärande flygplan, spaningsflygplan och störflygplan som uppträder på höjder ovanför våra jaktflygplans praktiska verkanshöjd”.
Vid slutet av juni 1961 fick flygvapnet klartecken att beställa materiel till sex divisioner med avbeställningsrätt för tre, men 1963 beslutades att samtliga sex skulle beställas. Robot 68 var en vidareutveckling av Robot 365 (Bloodhound MK I) men till skillnad från Robot 365 så skulle Robot 68 också vara rörlig. Systemet konstruerades av brittiska industriföretag med British Aircraft Corporation (B.A.C.) som var systemsammanhållande.
2. Budget och leverans
Budgeten uppgick till 400 miljoner kronor för leveransen från Storbritannien av bland annat robotar och lavetter, och cirka 400 miljoner kronor för leveransen i Sverige av fordon, radiolänk samt andra åtgärder som fortifikatoriska anläggningar och löpande underhåll i cirka 30 år (för cirka en miljon kronor per år). En total livstidskostnad på cirka en miljard kronor i 1965 års penningvärde (år 2017 motsvarar det cirka elva miljarder kronor) var beräknad för att hålla systemet i topptrim.
Sverige köpte in 96 stycken RB 68, samt ytterligare tio som skulle användas för olika tester. Samtliga 96 robotar var krigsplacerade på förbanden, de värnpliktiga övade alltså med samma skarpa robotar som i händelse av krig skulle användas mot fientligt flyg.
Vid leveransen planerades omfattande leveranskontroller i Sverige. Materielenheterna slutprovades separat vid varje leverantörs verkstad. Systemet kopplades dock aldrig ihop till ett fungerande system före leveransen till Sverige, detta nödvändiggjorde en omfattande prövning i samband med leveransen till Sverige:
- Funktionsprov med separata utrustningar, motsvarande slutprov hos leverantören.
- Hopkoppling av robotgrupperna (rbgrp) och funktionsprov av systemet.
- Ett kortare systemprov med robotgruppluton, även omfattande flygprov med invisning från stridsledning och luftbevakning (STRIL).
- Ett speciellt typprov med den första rbgrp för att kontrollera STRIL-anpassningen som var specifik för Sverige. Det skedde ett samarbete med LFC/05 Puman, som vid denna tidpunkt (hösten 1964) befann sig i ett i driftsättningsskede.
- Prov med två regionala robotverkstäder, F8 Barkarby och TELUB i Växjö.
Proven genomfördes av leverantörens arbetslag, varvid svensk personal fungerade som kontrollanter. Detta innebar att ett 30-tal britter tillbringade mellan två till tre år vid F8 Barkarby för att assistera personal från Svensk Radio AB (SRA) och kontrollera ett tiotal anställda militärer.
Arbetet i Sverige var komplicerat från första början eftersom föreskrifterna för leveransproverna inte fanns färdiga utan skrevs, diskuterades och fastställdes omedelbart före varje provskjutning. Under dessa omständigheter var det inte ovanligt att stämningen mellan leverantören och den militära personalen kunde bli hetsiga. Dessa problem samt försenade leveranser gjorde att den ursprungliga tidplanen fick utges i hela sju upplagor. Trots allt så kunde den första robotgruppen levereras under hösten 1964, i tid för samprov med LFC/O5 Puman. Övriga robotgrupper levereras sedan med två månaders intervall och hela provperioden var genomförd innan sommaren 1966.
Underhållssystemet omfattade två regionala robotverkstäder, en vid F8 Barkarby och en vid TELUB AB i Risinge utanför Växjö. Vidare skulle flygvapnets centrala verkstäder verka inom sina respektive specialområden. Under programmets gång fick stora förändringar vidtas på underhållsområdena. På grund av svårigheterna att behålla kvalificerad personal vid F8 flyttades denna verkstad och slogs ihop med den i Risinge. Senare övertog det nybildade statliga Förenade Fabriksverken (FFV) de centrala verkstäderna.
3. Utrustning och funktion
Den brittiska utformningen av systemet var anpassad till en stationär uppställning med möjlighet att flygtransportera materielen. Det svenska försvaret med stark tonvikt på rörlighet och maskering nödvändiggjorde förändringar i systemet så att det blev anpassat för landsvägstransport. Detta skedde genom att större enheter försågs med hjul, samt genom att förbanden utrustades med tunga lastbilar försedda med hydraullyftkranar. Dessutom så kamouflage målades all materiel (i England så var robotarna vitmålade).
Luftvärnsrobotkompaniet innehöll följande viktigare materiel:
- Radiolänk.
- Robotgruppcentral.
- Belysningsradar.
- Fyra lavetter.
- Åtta robotar, två motorelverk.
- Kraftfördelningsenhet.
- 11 km kablar, fordon, provutrustningar m.m.
Radiolänken (rl 21 lastad på släp, senare rl 23 lastad i skåpbil) var den enhet varmed kompaniet anslöts till LFC med en dubbelriktad tal- och dataförbindelse. På datakanalen överfördes måldata och diskreta signaler.
Robotgruppcentralen (rbgc) var kompaniets stridsledningscentral, varifrån
robotstridsledaren ledde kompaniets stridsledning. Robotgruppcentralen var uppbyggd kring en dator som beräknade och presenterade erforderlig data. Datorn innehöll också funktioner för styrning och övervakning av robotens klargöring och övriga tekniska funktioner i systemet.
Belysningsradarn (bbr) var en FMCW radar på 3 cm bandet som utnyttjade dopplereffekten. Härigenom fick radarn goda låghöjdsegenskaper eftersom markekon inte störde målföljningen. Radarn påverkades inte av remsstörning och hade mycket god följningsförmåga mot brusstörande mål. Via mark- och flygreferensantennerna kunde kommandosignaler överföras till roboten på marken och i luften inne från rbgc.
Lavetten försåg roboten med hydraultryck, kylluft och elkraft samt förmedlade alla signaler till och från roboten vid provning och under förberedelser för skott. Utöver detta så var lavetten vridbar för att ge roboten rätt utgångsbäring och den utgjorde underlag för roboten så att denna kunde starta i rätt elevationsvinkel (fast 34°).
Roboten var cirka åtta meter lång och hade en startvikt på två ton. Den drevs av två rammjetmotorer som gav en marschfart av Mach 2,7. Roboten startades med hjälp av fyra startraketer som tillsammans vägde cirka ett ton. Roboten styrdes enligt syftbärings-principen. Målsökaren som var semiaktiv var låst på den från målet reflekterade belysningsradarsignalen och kunde därför ge lämpliga styrsignaler till robotens styrsystem oavsett målets manövrer. Om målet var en brusstörare låste målsökaren i stället på brussignalen. Roboten manövrerades med hjälp av vridbara vingar, vilka alternativt fungerade som skevroder eller höjdroder. Den var försedd med zonrör och en stridsladdning, och dess topphöjd var över 20 km med en räckvidd över 185 km.
För att få en uppfattning av hur stort det operativa systemet 68 var så kommer här en lista på antalet släpvagnar, fordon, motorcyklar o.s.v. som ingick i hela leveransen till flygvapnet:
- Robotgruppcentral – 12 stycken släpfordon (eldledningscentral).
- Belysningsradar – 12 stycken släpfordon (eldledningsradar).
- Lavetter – 48 stycken (nyutvecklad med integrerad hydraul- och kylenhet).
- Robotar – 96 stycken (samt ytterligare tio stycken förberedda för skjutning).
- Radiolänk 21 – 12 stycken släpfordon (senare utbytt mot radiolänkbil 381).
- Simulatorer – 2 stycken på F8 Barkarby.
- Totalt 348 stycken fordon av olika slag utöver ovan nämnda släpfordon, varav 108 stycken robotlastbilar 809 och 810 (med vinsch), 24 stycken robotsläp, 12 stycken verkstadsvagnar, 24 stycken motorcyklar o.s.v.
4. Fredsorganisation
Materielleveranserna genomfördes åren 1963-65. Genom riksdagsbeslut 1963 organiserades inom flygvapnet sex robotdivisioner fördelade på:
- F8 Barkarby – två divisioner, en övningsdivision och en skoldivision.
- F13 Bråvalla – en övningsdivision.
- F17 Kallinge – en övningsdivision. 1974 bildades en robotbataljon på både F13 och F17 med tre kompanier vardera (F8, F10, F12 avvecklade robot 68 samtidigt). Bataljonerna vid F13 och F17 avvecklades 1978.
- F10 Ängelholm – en övningsdivision.
- F12 Kalmar – en övningsdivision.
Samt 1968 en robotledningsenhet vid vardera:
- LFC/S1 Kobran.
- LFC/O5 Puman.
Varje övningsdivision hade i fredstid tillgång till två materielgrupper, en i ständig beredskap och en för utbildning. På varje flottilj fanns en fredsgrupperingsplats och en utbildningsplats samt ett unikt robotförråd. Förutom flottiljen fanns där tillgång till en övningsplats som låg cirka tio mil från flottiljen för att meningsfullt öva motormarscher och övriga transporter. Cirka åtta veckor per år övade man där med allt ifrån enkla hanteringsövningar till kompletta stridsgrupperings- och tillämpningsövningar i luftförsvaret. De värnpliktiga förlades i tält medan befälen förlades på närliggande pensionat och vandrarhem (förutom under krigsmaktsövningarna, då sov alla i tält).
Införandet av luftvärnsrobotsystem 68 innebar att flygvapnet fick en helt ny förbandstyp. Detta medförde behov av taktisk utprovning och framtagning av nya reglementen och utbildningsbestämmelser. Efter vissa initialsvårigheter av teknisk och personell art utvecklades robotkompanierna till väl fungerande och fältmässiga förband som flitigt deltog i flygvapnets och militärbefälhavarnas tillämpningsövningar.
Samtliga övningsdivisioner hade uppgifter som ett kuppförsvarsförband, tillika uppgifter som utbildningsförband för att tillgodose de tolv krigsförbanden med personal och rätta kunskaper. För att såväl fredsförbanden som krigsförbanden skulle kunna erhålla en hög beredskap utbildades två värnpliktsomgångar varje år. En omgång ryckte in i januari och den andra i juli. Detta innebar att det alltid fanns en värnpliktsomgång som hade sex månaders utbildning när nästa omgång ryckte in. De självständigt uppträdande luftvärnsrobotkompanierna krävde flera olika utbildningar för att klara sin roll i krig. Kompanierna var indelade i en radar- och en robotpluton samt en stabs- och en trosstropp.
De kategorier av värnpliktiga som utbildades vid flottiljerna var radarman, robotman och bilförare. Värnpliktig systemövervakare (sövak – civilingenjör) utbildades vid skoldivisionen F8 Barkarby. Dessa tilldelades sedan ett förband där de gjorde en praktikperiod innan de krigsplacerades. Övriga kategorier av värnpliktiga som behövdes till krigsförbandet fick fyllas på av pliktverket. Hela krigsförbandet träffades första gången när det kallades in till KFÖ. Efter samövning under KFÖ fungerade krigsförbanden mycket bra.
Varje värnpliktsomgång skulle enligt utbildningsplanen genomföra tre kompaniövningar på en grupperingsplats (övningsplats) utanför flottiljen. Tre övningar genomfördes varje halvår och eftersom de värnpliktiga hade en tjänstgöringstid på 330 dagar så blev det sex övningar för de flesta. Kompanierna deltog också i andra övningar utanför flottiljen, vilket innebar att många värnpliktiga vid sin utryckning hade genomfört cirka 35 dygn i fält. Detta var unikt för flygvapnet vid den tiden.
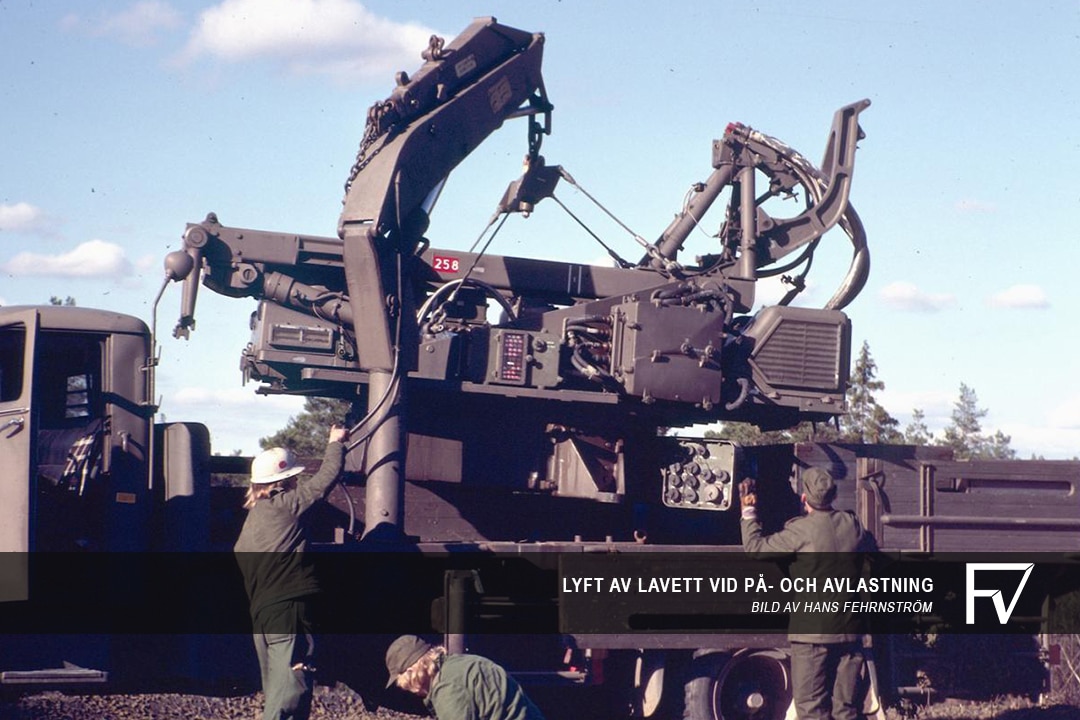
De värnpliktiga radar- och robotmännen utbildades enligt en speciell klargöringsinstruktion (SKI) så att de under krig och under värnpliktiga gruppchefers ledning kunde klargöra respektive bruksenhet fram till och med kontroll efter start. Under värnpliktige systemövervakares ledning skulle de också kunna klargöra robotgruppen i sin helhet inför skott. I klargöringen ingick tillsammans med bilförare, flera precisionslyft med hjälp av lastbilskran, till exempel att lyfta:
- Lavetten och sätta ner den på betongplattan för avvägning.
- Roboten vid klargöring och omladdning.
- Radarantennen på plats. Detta krävde ännu större precision.
Hans Fehrnström återberättar om två incidenter som utspelade sig under övningar:
”Jag vet att man tappade en robot vid lyft på F8 och att F13 hade ett robotsläp som gled in i en bergvägg på väg till övningsplatsen så rodret blev skadat”
Förbandens krav på rörlighet krävde en omfattande fordonsutbildning. I varje inryckningsomgång utbildades ett antal värnpliktiga till bilförare. Dessa fick utbildning i att köra tung lastbil med släp. Sedan robotkompanierna, utöver robotlastbil 809 och 810, hade tillförts terrängbilar av typ ltgb 941D, fick bilförarna även lära sig att köra i terräng. De utvecklade dessutom mycket god färdighet i att använda kran samt fick viss utbildning i att röja snö. Genom att alltid ha bilförare med bra utbildning fick robotkompanierna en hög beredskap för omgruppering vid beredskapshöjning.
Främst för att säkerställa att omgruppering kunde ske under radiotystnad, med kompaniets cirka 20 fordon, tillfördes krigsförbandet MC-ordonnanser. Två motorcyklar av typ Husqvarna 256 tilldelades varje robotkompani.
Varje robotkompani hade en sjukvårdsgrupp med tre sjukvårdare. I varje robot- och radargrupp fanns också en man med tilläggsutbildning till sjukvårdsman. Dessa radar- och robotmän fick 80 timmars extra sjukvårdsutbildning utöver vad alla värnpliktiga fick. Denna utbildning ägde också rum i egen regi vid bataljonen, oftast med inlånade sjukvårdsinstruktörer. Detta system var unikt inom Flygvapnet vid den här tiden.
En kokvagn med egna kockar ingick även de i kompaniet, för i händelse av krig så skulle varje enskilt kompani klara sig helt på egen hand och behövde därför ha med sig precis allt, såsom ammunition till samtliga vapen, förläggningsmateriel, färskvatten, livsmedel o.s.v.
Robotkompanierna svarade för sin egen bevakning och vid behov även försvar av grupperingsplatsen. Särskild markstridskurs för befäl krigsplacerade vid lvrbkomp 68/R anordnades vid Flygvapnets Markstridsskola (FMS) vid F14 Halmstad, med början i augusti 1968. Personlig beväpning för all personal var kpist m/45 B, med undantag för sjukvårdarna som tilldelades pistol m/40. Som understödsvapen användes kulspruta m/36 samt så småningom även pansarskott 68. Särskilda markstridsövningar infördes i utbildningsplanen. Då övades bevakning och försvar av grupperingsplatsen. Fältarbeten och skydd mot kemiska stridsmedel övades ofta.
Tack vare en god tillgång till kronans fordon så fanns goda möjligheter till omgruppering till spridningsplatser vid höjd beredskap. Först sattes beredskapsgruppen i ”1 min eldberedskap” och så fort resurserna medgav, flyttades utbildningsgruppen med sina skarpa robotar till sin spridningsplats.
5. Målsättning
I flygstabens målsättning för RB 68 stod bland annat att kunna bekämpa kvalificerade mål såsom:
- Störande mål.
- Mål med överljudsfart.
- Mål över och utanför jaktens verkansområde.
Robotsystemets stridsledning leddes normalt från LFC i strilsystemet där insatsbesluten fattades. Därför inrättades i STRIL 60-systemet en särskild robotledningsorganisation som samarbetade med jaktledningsorganisationen.
RB 68 kunde dock genomföra stridsledning autonomt, men med vissa begränsningar. Från strilsystemet översändes via radiolänk måldata till robotgruppcentralen, där de bland annat utnyttjades för inriktning av belysningsradarn. Denna sökte inom ett begränsat område, fångade och följde därefter automatiskt målet. Avstånd, bäring, elevation och radiell målfart utnyttjades av robotgruppcentralen för att bland annat beräkna avfyringstidpunkt samt beräkna vinklar för att styra ut lavett och målsökarantenn. Efter avfyringen och startfasens slut övertogs styrningen av robotens målsökare.
Samarbetet med STRIL 60 utmejslades alltmer. Från att ha varit tänkt som ett exklusivt system för “mål över och utanför jaktens verkansområde” blev det allt vanligare att LFC anvisade mål till RB 68, där jaktens intercept av en eller annan orsak misslyckats. Tilltron till systemet tilltog hos alla som arbetade med det. Tyvärr delades inte denna konfidens av chefer i flygvapnet på beslutande nivå.
Inom första flygeskadern (E1) fanns ett stort behov att analysera motståndarens vapensystem, särskilt luftvärnshotet. Den bästa datorn för detta ändamål i Sverige vid denna tid var RB 68-datorn Argus 200 i robotgruppcentralen. Först var det tänkt att använda simulatorerna på F8 Barkarby för detta ändamål men av olika skäl så blev det inte så, och från och med 1 juli 1970 skedde detta på F13 Bråvalla.
6. Kontrollskjutning
Systemets funktion mot luftmål kontrollerades vid skjutningar på försöksplatsen i Vidsel, varvid förbanden också fick tillfälle att visa sin förmåga till långa landsvägsförflyttningar. Sådana kontrollskjutningar genomfördes första gången 1968 av F8 Barkarby och den sista skjutningen genomfördes 1975 av F17 Kallinge. Efter långa förberedelser skedde den första skarpa skjutningen med roboten i oktober 1968 vid robotavdelningens försöksplats i Vidsel, Lappland. Dåligt väder och materielproblem försenade programmet och först efter cirka en månad på plats gick det första skottet. Resultatet blev en perfekt träff på målet, en målrobot av typ RB 02. Under första delen av 1970-talet genomfördes kontrollskjutningar vid flertal tillfällen. Alltmer avancerades skjutfall valdes, omfattande manövrerande mål, remsfällning och elektronisk störning.
7. Krigsorganisation
Vid mobilisering övergick robotgrupperna till tolv stycken autonomt rörliga luftvärnsrobotkompanier. Robotgrupperna omgrupperades i etapper till sina spridningsplatser. I närheten av dessa fanns en inryckningsplats och ett mobiliseringsförråd. Vid inryckningsplatsen krigsorganiserades kompaniet (s-förbandet) med stabstropp, radarpluton, trosstropp, robotpluton (c:a. 140 man) innan motormarschen till stridsgrupperingsområdet påbörjades.
Varje kompani hade en i förhand utsedd förstahandsplats, det vill säga en specifik krigsgrupperingsplats, till vilken i händelse av krig eller beredskapshöjning kompaniet skulle bege sig. Organisation, utbildning och utrustning var anpassade för ett självständigt uppträdande med täta omgrupperingar mellan alternativa platser. Skydd för den relativt skrymmande och sårbara materielen erhölls genom att välja förberedda platser i täckt terräng, genom maskering och omgruppering, så snart förbandet bedömdes vara upptäckt.
I ett krigsorganiserat robotkompani ingick det 138 man varav c:a 13 var fast anställda officerare, resten var värnpliktiga. Till kompaniet tillhörde även två reservofficerare.
8. Avvecklingen
1973 föreslog regeringen att fredsorganisationen skulle minskas, och att vissa delar skulle få lägre beredskap. Riksdagen beslutade att systemet från och med 1 juli 1974 skulle bestå av två enheter istället för de sex enheter som fanns från början när systemet införskaffades, dock skulle belysningsradarfunktionen behållas och utvecklas inom STRIL-systemet. De två övningsdivisionerna vid F13 Bråvalla och F17 Kallinge blev robotbataljoner och övriga fyra divisioner drogs in (två på F8, och en på F12 samt F10).
Nådastöten för RB 68 med dess robotbataljoner kom med valresultatet 1976, avvecklingen gick snabbt och omfattande följande:
- Antalet lvrbkomp 68 i krigsorganisationen trappades ner successivt från ursprungliga tolv till att helt utgå 30 juni 1978. Under 1978 drogs även de två robotbataljonerna in.
- Viss verkstadsutrustning kunde användas för andra robotsystem.
- Elektronik som inte kunde användas fick destrueras på grund av sekretessen som fortfarande gällde gentemot de övriga länderna som använde systemet, t.ex. robot/lavettelektronik.
- Lavetter och robotattrapper skulle ställas upp vid flottiljer som minnesmärken.
- I övrigt skulle lavetter säljas eller destrueras. Cirka 30 robotar såldes redan 1977-1978 till Schweiz och cirka 30 robotar återköptes 1978 av MOD/RAF.
Filmen – “R.A.F. get bloodhound missiles” förevisar robotens funktion:
Tack till Fredrik Lagerlöf för bildmaterial och faktaunderlag om RB 68 (www.sveaflygflottilj.se), Hans Fehrnström för bildmaterial och faktaunderlag. Artikeln skrevs med hjälp av Luftvärnsrobotsystem 68 Bloodhound MK II av Dag N H Malmström.
Tack för ett mycket intressant inlägg!
Kul att du uppskattar artikeln!
Intressant läsning! Särskilt för en som gjort värnplikt på LV6 i Halmstad.
Kul att du gillar artikeln Mitch!
Tack mycket intressant att läsning, gjorde värnplikten på F13 Norrköping luftvärn robot bataljonen 1974-75 , även ett rep möte.
Mycket intressant och informativ artikel om detta kvalificerade vapen.
Jag är pensionerad flygledare från F17 och råkade jobba den dag då F17:s RB68 flögs tillbaka till England, d v s det återköp som nämns i artikeln. Osäker på datumet, men troligtvis runt 1979. Det var i varje fall en lördag och tillgick så att RAF ordnade en mindre ”luftbro” mellan en av sina baser och F17. Tre C130 Hercules flög varsin dubbeltur med robotar och tillhörande utrustning – i allt sex flygplanlaster under dagen. F17 hade ingen egen planerad flygverksamhet denna lördag utan endast grundberedskap. Jag var således ensam i tornet eftersom det var minimalt med flygtrafik i övrigt. Då flottiljen var i det närmaste stängd och RAF-besättningarna behövde dels komplettera väder- och annan flyginfo, och dels behövde en ”bensträckare” (toabesök mm) så lotsades de upp till tornet efterhand som lastningen påbörjades. Med hjälp av en värnpliktig ordnade jag enkel fika till dessa brittiska gentlemän, d v s te, kronans pansarkex, marmelad och möjligen något mera. Jag fick frågan varför Sverige sålde tillbaka detta välutvecklade och uppgraderade robotsystem. Tja det är inte helt lätt för en 27-åring med löjtnants grad att ha en färdig ”militärpolitisk analys” av det. Spontant svarade jag ”politisk klåfingrighet”, den äldre RAF-piloten verkade finna detta svar helt rimligt och adekvat !
Hej Ingmar, kul att du finner artikeln intressant och informativ. Kul att höra lite historier från den tiden de begav sig, hur transporten vid återköpen gick till visste jag inte, men nu vet jag – tack! Trevligt att du kunde ”vaska” fram kronans klassiska pansarkex med marmelad, taste of sweden så att säga hehe. Lät inte som den lättaste frågan att få om man inte är påläst i ämnet och varför de valde att sälja tillbaka hela systemet igen. Tycker också ditt svar var helt rimligt och riktigt!
Hur var det att jobba som flygledare på F17 under U-137´s grundstötning, måste bara fråga när jag väl har chansen 🙂
Tack skall du ha för infon. Gör kul. Gjorde lumpen på F10
Kul att du uppskattar artikeln Roger 🙂
Den skarpa roboten sköts utanför Vidsel i maj 1968